한국전자기술연구원(KETI) 지능로보틱스연구센터 책임연구원(공학박사)

1. IEEE ICRA 2025 개요
IEEE International Conference on Robotics and Automation(ICRA:라이브바카라 및 자동화 국제컨퍼런스)는 IEEE 라이브바카라 및 자동화협회가 주최하는 세계 최고 권위의 라이브바카라 전문 학술행사로, 2025년에는 미국 조지아주 애틀랜타에서 5월 19일부터 23일까지 조지아 월드 콩그레스 센터에서 성대하게 개최되었다.
올해 ICRA는 전 세계 65개국 이상에서 약 7000명 이상의 참가자가 방문하였고, 4153편 이상의 논문이 접수되어 약 39%의 최종 채택률을 가진 1606여 편의 레귤러 페이퍼를 포함한, 2107여 편의 논문이 구두 발표 또는 포스터 발표로 선정되었다.
올해 프로그램은 3개의 기조강연, 8개의 키노트 강연, 100여 개의 기술 세션, 30개 이상의 워크숍 및 튜토리얼, 산업 전시 등으로 구성되어 어느 해보다 다양하고 풍성하게 진행되었다.

2. 기조 강연(Plenary Talk) 및 키노트(Keynote) 강연 주요 내용
2.1. 기조 강연
ICRA 2025의 기조 강연은 매일 오후에 진행되는 메인 세션으로, 로보틱스의 기술적 진보뿐 아니라 사회적, 산업적, 철학적 함의를 포괄적으로 조망하는 자리였다. 3명의 발표자 모두 각자의 분야에서 획기적인 성과를 낸 연구자로서, 기술과 인간, 산업과 윤리 사이의 접점을 깊이 있게 풀어냈다.
2.1.1. 미 스탠포드대 앨리슨 오카무라(Allison Okamura) 교수 - Rewired: The Interplay of Robots and Society
오카무라교수는 수술용 텔레로봇, 바이오프린팅, 고령자 보조 기술 등 다양한 사례를 통해 로봇이 인간의 신체를 ‘보완’하는 방식으로 진화해 온 역사를 조망했다. 특히 ‘바인로봇(vine robot)’과 같은 비정형 형태의 로봇이 비보행 환자의 이동을 돕거나 자율적으로 옷을 입히는 방식 등, 디자인혁신이 어떻게 인간 중심의 로봇을 가능하게 하는지를 강조했다.
이는 로봇 기술이 단순히 생산성을 높이는 도구를 넘어, 돌봄(care), 연결(connection), 주체성(agency)의 개념을 재정의할 수 있다는 점을 재상기시키는 발표였다.
2.1.2. 더스티 로보틱스 CEO 테사라우(Tessa Lau) 박사 - So You Want to Build a Robot Company?
더스티 로보틱스(Dusty Robotics)를 통해 미국 전역의 건설 현장에 라이브바카라을 도입한 라우 박사는, 라이브바카라 스타트업을 창업하고 지속시키는 현실적인 경험을 공유했다.
제품-시장 적합성(product-market fit)의 어려움, 초기에 겪었던 라이브바카라 실패 사례, 그리고 안전성과 신뢰성을 확보하기 위한 반복적인 검증 과정을 솔직하게 소개하며, 단순한 이상이 아닌 현실에 기반한 라이브바카라 창업 전략을 강조했다.
산업 현장을 실제로 변화시키는 라이브바카라 기업이 되는 데 필요한 점들을 구체적으로 제시한 강연이었다.
2.1.3. 스위스 취리히 연방공대 라파엘로 단드레아(Raffaello D’Andrea 교수)- Models are Dead, Long Live Models!
단드레아 교수는 축구 라이브바카라, 자율 드론, 물류 라이브바카라 등 다양한 프로젝트를 통해 전통적인 모델 기반 제어의 한계와 가능성을 동시에 조명했다.
이 발표의 백미는 취리히 연방공대(ETH Zurich)에서 개발한 오픈소스 플랫폼 사이버러너(CyberRunner)로, 인간이 손으로 공을 굴려 미로를 통과시키는 게임을 1시간 만에 습득하고 인간을 능가하는 AI 라이브바카라에 대한 소개였다.
딥러닝과 강화학습의 등장으로 모델 기반 설계가 사라질 것이라는 관측에 대해, 그는 모델은 여전히 유효하며, 오히려 그 정의가 확장되어야 한다는 사실을 상기시켰다.
2.2. 키노트 강연
ICRA 2025에서는 14개 주제 영역에 걸쳐 총 43건의 키노트 강연이 진행되었다. 각 세션은 기술적 깊이와 함께 실제 적용 가능성을 강조하며, 다양한 연구자들이 현재 로보틱스의 경향과 미래 비전을 제시했다. 다음은 인상 깊었던 키노트 주제들과 그 흐름을 정리한 것이다.
2.2.1. 자율성 기반의 로봇 설계와 재활 기술
‘재활 및 신체 보조 시스템(Rehabilitation & Physically Assistive Systems)’ 세션에서는 브렌나 아걸(Brenna Argall) 노스웨스턴대 교수와 한국 포스텍 김기훈 교수 (POSTECH)의 발표가 주목을 끌었다.
아걸 교수는 라이브바카라 자율성이 장애인의 자율성을 어떻게 도울 수 있는지를 논의했으며, 김 교수는 복잡한 제어 대신 ‘기계적 지능’을 강조하며 지능이 내장된 구조 설계를 통한 효율적 조작을 제안했다. 또한 크리스티나 피아자(Christina Piazza) 뮌헨공대 교수는 생체조직의 유연성과 신경 제어 전략을 모방한 바이오닉 의수 설계를 소개했다.
2.2.2. 라이브바카라 제어의 새로운 물결
‘최적화 및 제어(Optimization & Control)’ 세션에서는 자율 학습 기반 제어에 대한 깊이 있는 발표가 이어졌다. 토드 머피(Todd Murphey) 노스웨스턴대 교수는 라이브바카라이 고립된 상태에서 자율적으로 학습할 수 있도록 최적화된 제어 프레임워크를 설명했고, 앙겔라 쇼엘릭(Angela Schoellig) 뮌헨공대 교수는 대규모 데이터와 LLM(대규모 언어모델)에 기반한 다중 라이브바카라의 행동 학습 가능성을 제시하며 주목받았다.
2.2.3. 산업 자동화와 물류 혁신
‘자동화(Automation)’ 세션에서는 실제 산업에 가까운 응용 사례들이 눈에 띄었다. 마리아 피아 판티(Maria Pia Fanti) 이탈리아 바리공대 교수는 스마트 모빌리티와 물류를 위한 AI 기반 최적화 기술을 발표했고, 한국 성균관대 문형필 교수는 다양한 패키지 형태를 자동으로 분류하고 처리할 수 있는 로봇 시스템을 소개했다. 이는 실제 컨테이너 환경에서 사람보다 높은 효율을 달성한 인상적인 사례였다.
2.2.4. 인간-라이브바카라 상호작용(HRI)의 최전선
‘인간-라이브바카라 상호작용(Human-Robot Interaction)’ 세션에서는 미국 조지아공대 소니아 체르노바(Sonia Chernova) 교수와 홀리 얀코(Holly Yanco) 미국매사추세츠 주립대 로웰(UMass Lowell) 교수의 발표가 돋보였다.
체르노바교수는 인간 환경 내의 다양성에 적응하는 로봇 행동 설계를 다뤘고, 얀코 교수는 다양한 인터페이스(멀티터치, VR/AR, 음성 등)를 통한 HRI 실험과 그 과제를 20년의 연구 성과를 통해 소개했다. 이동휘 오스트리아 빈공대 교수는 AI 기술에 기반한 인간 의도 파악 기술 연구 성과를 소개하였다.
2.2.5. 생체모방 라이브바카라시스템의 진화
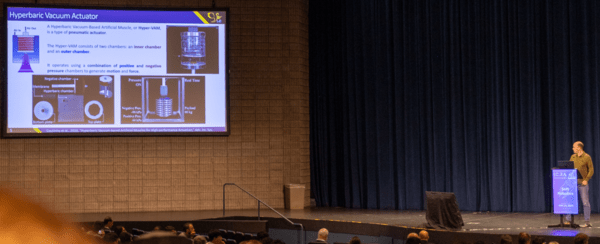
‘소프트 로보틱스 및 생체모방 로보틱스(Soft Robotics & Bio-inspired Robotics)’ 세션에서는 생체 구조와 기능에서 영감을 받은 라이브바카라 설계가 중심 주제로 다뤄졌다.
로버트 카츠슈만(Robert Katzschmann) 취히 공대교수는 생물학적 세포와 합성 구조물을 결합한 바이오하이브리드 로봇의 미래를 조망했고, 서울대 조규진 교수는 인간 손 및 자연계의 엔드 이펙터가 가지는 능력을 모사할 수 있는 다양한 그리퍼 설계 사례를 통해 자연에 존재하는 적응성과 효율성에 기반한 로봇 개발의 중요성을 강조했다. 휴고 로드리고(Hugo Rodrigue) 성균관대 교수는 공압 기반의 소프트 액추에이터 및 소프트 로봇 한계를 뛰어넘을 수 있는 가능성을 가지는 기술들에 대하여 발표하였다.
2.2.6. 군집 라이브바카라과 협업 시스템
‘멀티라이브바카라시스템(Multi-robot Systems)’ 세션에서 새바인 호어트 영국 브리스톨대 교수는 전통적인 스웜 라이브바카라 개념을 넘어, 고성능 AI와 글로벌 센서 네트워크를 통합한 차세대 분산 협업 시스템을 제안했다.
또한 앨리사 피어슨(Alyssa Pierson) 미 보스톤대 교수는 '준협력(semi-cooperative)' 관계를 고려한 다중 라이브바카라 제어 전략을 소개하며, 자율주행과 물류 드론 등 실제 응용 가능성을 보여주었다.
2.2.7. 조작과 이동의 경계 확장
‘매니퓰레이션(Manipulation:조작)’ 세션에서는 태밈 애스포(Tamim Asfour) 독일 카를스루에 공대 교수가 “라이브바카라은 손으로 생각한다”는 주제로 조작과 지능의 관계를 조명했다.
‘로코모션(Locomotion:이동)’ 세션에서는 한국 KAIST 박해원 교수와 루도비치 라게티(Ludovic Righetti)뉴욕대 교수의 발표가 주목받았으며, 각각 하드웨어 구조 혁신과 강화학습 기반 최적화 알고리즘을 통한 민첩한 이동 구현 사례를 다루었다.
3. 주요 발표 논문 소개
ICRA 2025에서 주목한 기술 트렌드 중 하나는 생성형 AI, 데이터 기반 설계, 감각통합형 EOAT(End-of-Arm Tooling·로봇팔 종단장치), 인간-로봇 상호작용과 같이 로봇 매니퓰레이션과 인공지능의 경계에서 협력 가능성이 빠르게 확장되고 있다는 점이다. 다음은 이와 관련된 주제를 중심으로 발표된 논문 중 인상적이었던 논문들을 소개한다.
3.1. 생성형 모델의 로보틱스 분야 활용
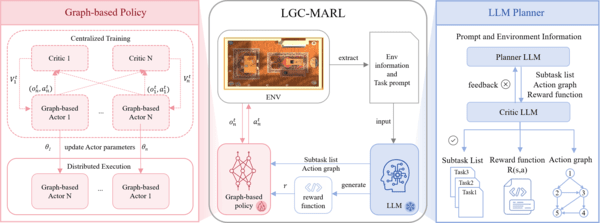
▲'Enhancing Multi-Agent Systems via Reinforcement Learning with LLM-Based Planner and Graph-Based Policy. (LLM 기반 플래너와 그래프 기반 정책을 활용한 강화 학습을 통한 다중 에이전트 시스템 향상)'
핑 안 테크놀러지. 중국 칭화대의 지치 지아(Ziqi Jia)는 LLM 기반 플래너와 그래프 정책을 활용한 강화학습 기반 멀티에이전트 시스템 향상에 대한 논문을 발표하였다. 대규모 언어모델로 의사결정 그래프를 생성, 강화학습 정책에 접목하였으며, 다양한 멀티에이전트 시나리오에서 기존 방법 대비 협동성과 성능이 향상됨을 보였다. LLM-강화학습 융합이 멀티로봇 시스템의 미래가 될 수 있는 가능성을 시사한다.
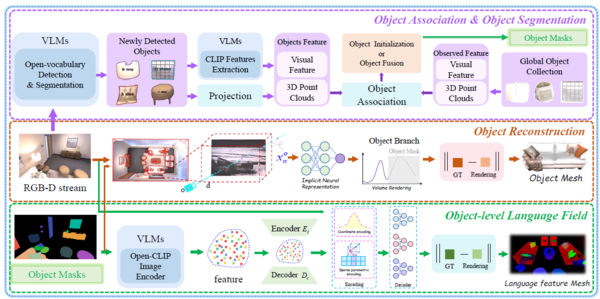
▲'LE-Object: Language Embedded Object-Level Neural Radiance Fields for Open-Vocabulary Scene. (LE-Object: 개방형 어휘 장면을 위한 언어 내장 객체 수준 신경 광도 필드)'
중국 동북대학교 정보과학대왕 맹팅(Mengting Wang)은 오픈 보캐블러리(Open Vocabulary) 씬을 위한 Language Embedding Object-Level Neural Radiance Field에 관한 논문을 발표하였다. 언어-비전 융합 신경망을 통해 미지의 객체까지 인식·재구성 가능한 씬 표현을 실현하였다. 복잡한 환경의 확장성 높은 3D 인식과 재구성에 기여한다.
▲'DLO Perceiver: Grounding Large Language Model for Deformable Linear Objects Perception. ('DLO Perceiver: 변형 가능한 선형 객체 인식을 위한 대규모 언어 모델 구축)'
이탈리아 볼로냐대학전기전자 및 정보공학과알레시오 캐포랠리(Alessio Caporali)는 대형 언어모델 기반 변형선형 객체(DLO) 인지 프레임워크를 발표하였다. 이미지-텍스트 융합 및 Perceiver 구조를 활용해 케이블·로프 등 DLO 분할 정확도를 크게 높였다. 비전-언어 멀티모달 인식의 실제 적용을 보여준다.
▲'BUMBLE: Unifying Reasoning and Acting with Vision-Language Models for Building-Wide Mobile Manipulation.(BUMBLE: 건물 전체 모바일 조작을 위한 비전 언어 모델을 통한 추론 및 행동 통합)'
텍사스 오스틴대루타브 샤아(Rutav Shah)는 빌딩 전체 규모의 모바일 매니퓰레이션에서 비전-언어 모델을 활용한 리즈닝(reasoning)과 액팅(acting)의 통합에 대한 논문을 발표하였다. 대규모 비전-언어 모델을 통합한 로봇 지능 프레임워크를 제안하였으며, 실제 환경에서 다양한 작업 수행 능력을 평가하였다. 그 결과 복잡한 실내 환경에서 효율적으로 지각-계획-행동을 연계하는 성능을 보여주었다. 범용 모바일 로봇 플랫폼의 실용적 확장성을 입증한 연구이다.
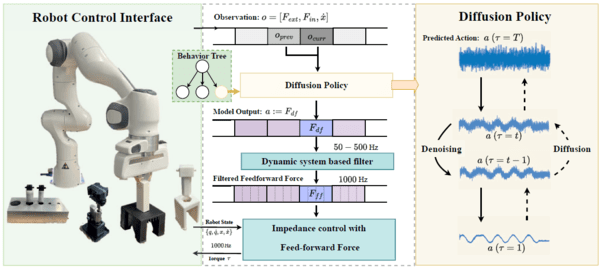
▲'TacDiffusion: Force-domain Diffusion Policy for Precise Tactile Manipulation. (TacDiffusion: 정밀한 촉각 조작을 위한 힘 영역 확산 정책)'
독일 뮌헨공대뮌헨 로봇및기계지능연구소(MIRMI)우 얀송(Yansong Wu)은정밀 촉각 조작을 위한 포스 도메인기반 확산정책(diffusion policy)에 관한 논문을 발표하였다. 디퓨전 모델을 통한 6D 힘 예측과 실시간 필터링을 결합, 다양한 정밀 조립 과제에서 높은 제로샷 성능(95.7%)을 달성하였다. 디퓨전 기반 촉각 제어의 실제 적용성을 입증했다.
3.2. 데이터 기반 메커니즘 설계 및 제어
데이터 기반 시스템 모델링 기술을 활용하여 로봇의 물리적인 메커니즘, 형태, 혹은 특정 부품(예: 소프트 로봇, 특수 메커니즘)을 설계, 개선하거나 제어하는 접근 방식과 관련된 다양한 연구들이 발표되었다.
▲'A Synergistic Framework for Learning Shape Estimation and Shape-Aware Whole-Body Control Policy for Continuum Robots. (연속 로봇을 위한 형태 추정 및 형태 인식 전신 제어 정책 학습을 위한 시너지 프레임워크)'
영국 에딘버러대 정보공학부 모하메드레자 카세이(Mohammadreza Kasaei)는 연속체(continuum) 로봇의 형태 추정과 형태 기반 전신 제어정책 학습을 결합한 프레임워크에 대한 논문을 발표하였다. 신경망 기반 형상 추정과 전신 제어를 통합하여 제어 효율을 높였으며, 다양한 형태의 연속체 로봇에 적용해 높은 적응성과 정밀도를 입증하였다. 복잡한 연속체 로봇의 제어에서 데이터 기반 통합 접근의 가능성을 보여준다.
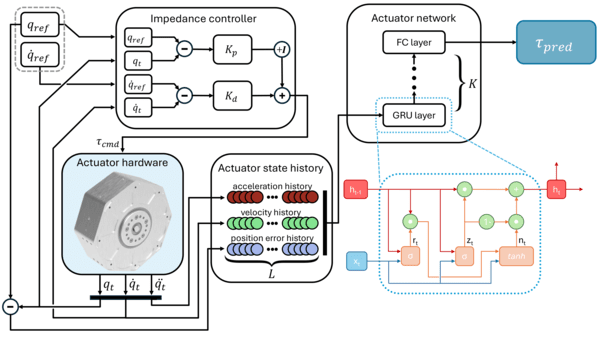
▲'Cycloidal Quasi-Direct Drive Actuator Designs with Learning-Based Torque Estimation for Legged Robotics. (학습 기반 토크 추정을 통한 다리 라이브바카라을 위한 사이클로이드 준직접 구동 액추에이터 설계)'
미국 UCLA컴퓨터과학 및 전기공학과 앨빈 쥬(Alvin Zhu)는 족형 라이브바카라용 사이클로이드 기어 기반 QDD 액추에이터와 토크 추정 네트워크를 개발한 논문을 발표하였다. GRU 기반 데이터 기반 토크 추정으로 실제-시뮬레이션 간 격차를 줄이고, 하드웨어 실험에서 높은 토크제어 정확도를 보였다. 최근 휴머노이드용 QDD 액추에이터에 대한 관심이 높은 이때 고성능·고신뢰 라이브바카라 액추에이터에 대한 개발 가능성을 보이는 논문이다.
▲'Physics-Informed Hybrid Modeling of Pneumatic Artificial Muscles. ('공압 인공 근육의 물리학 기반 하이브리드 모델링)'
프랑스 끌로드 베흐노 리용1대학의 젠멩 왕(Genmeng Wang)은공압 인공근육의 물리 기반 하이브리드 모델링에 관한 논문을 발표하였다. 실험적 데이터와 물리 기반 모델을 결합한 하이브리드 접근으로 실제 동작 예측 정확도를 크게 개선하였다. 유연구동 시스템 제어 모델링의 정확도를 높인 연구이다.
▲'AI-Enhanced Automatic Design of Efficient Underwater Gliders. (효율적인 수중 글라이더의 AI 강화 자동 설계)'
미국 MIT 컴퓨터과학및인공지능연구소(CSAIL)의 피터 이첸 첸(Peter Yichen Chen)은 AI 기반 자동 수중 글라이더 설계 프레임워크에 관한 논문을 발표하였다. 신경망 유체 모델과 형상/제어 동시 최적화 기법을 적용해 에너지 효율성과 다양성이 뛰어난 글라이더 설계를 실현하였다. 이는 복잡한 환경과 상호작용하는 시스템의 설계에 있어 데이터 기반의 최적화 가능성을 확인할 수 있는 성과이며, 다양한 분야에 대한 로봇 적용이 화두가 되는 최근 트렌드를 볼 때 타 분야로의 확장 가능성이 높은 연구이다.
▲'Geometric Design and Gait Co-Optimization for Soft Continuum Robots Swimming at Low and High Reynolds Numbers. (낮은 레이놀즈 수와 높은 레이놀즈 수에서 수영하는 소프트 연속체 라이브바카라을 위한 기하학적 설계 및 보행 공동 최적화)'
미국 오레곤 주립대 협동라이브바카라 및 지능형 시스템(CoRIS) 연구소 얀하오 양(Yanhao Yang)은연속체 소프트 라이브바카라의 형상 설계와 보행 동작 동시 최적화에 대한 논문을 발표하였다. 다중 레이놀즈 수 환경에서 최적 형태와 동작을 동시에 찾는 최적화 프레임워크를 제안하였으며, 실험으로 효율적 추진을 실현하였다. 다환경 소프트 라이브바카라 설계의 통합적 접근을 보여준다.
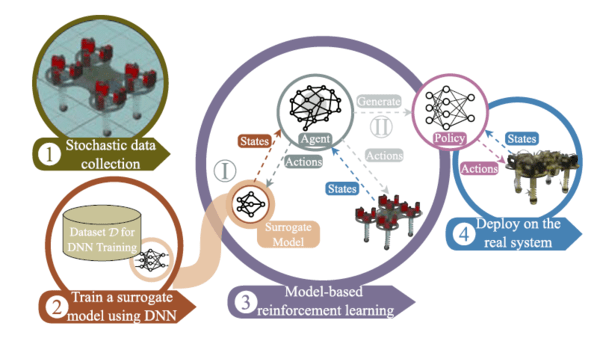
▲'Optimal Gait Control for a Tendon-driven Soft Quadruped Robot by Model-based Reinforcement Learning. (모델 기반 강화 학습을 통한 힘줄 구동 소프트 사족 라이브바카라의 최적 보행 제어)'
스웨덴 웁살라대 정보기술학과 사이버물리시스템연구실 쉬에지니우(Xuezhi Niu)는 모델 기반 강화학습을 이용한 소프트 4족 보행로봇의 최적 보행 제어에 관한 논문을 발표하였다. 물리 기반 시뮬레이션과 RL을 결합해 효율적이고 적응적인 보행 패턴을 생성하였다. 소프트 로봇 보행 제어의 실용적 한계를 극복할 수 있는 사례 중 하나로 보인다.
3.3. AI 활용을 위한 EOAT(End of Arm Tooling)
촉각, 시각 등 다양한 센서를 통합한 그리퍼 및 로봇 손 설계에 대한 발표도 활발했다. 특히 로봇 적용 분야 확장 및 AI 기반 작업을 위한, 물체 조작을 위한 메커니즘 및 센서를 포함한 EOAT 기술의 전반에 대한 연구가 돋보였다.
▲'Towards Autonomous Data Annotation and System-Agnostic Robotic Grasping Benchmarking with 3D-Printed Fixtures. (3D 프린팅 고정물을 이용한 자율 데이터 주석 및 시스템 독립적인 라이브바카라 파지벤치마킹)'
독일 뮌헨공대 컴퓨터사이언스과 로봇및메카트로닉스연구소 와웃 붜디즈크(Wout Boerdijk)는 로봇 그리핑 벤치마크 자동화에 관한 논문을 발표하였다. 자동 데이터 주석 및 범용 벤치마킹 구조에 기반하여 다양한 형태/타입의 로봇/센서에 해당 프레임워크를 적용 가능함을 입증하였다. 재현성 높은 그리핑 성능 평가를 가능하게 하는 이 연구는 AI 기반 조작 기술의 성능 평가 표준화를 위한 시도로 볼 수 있다.
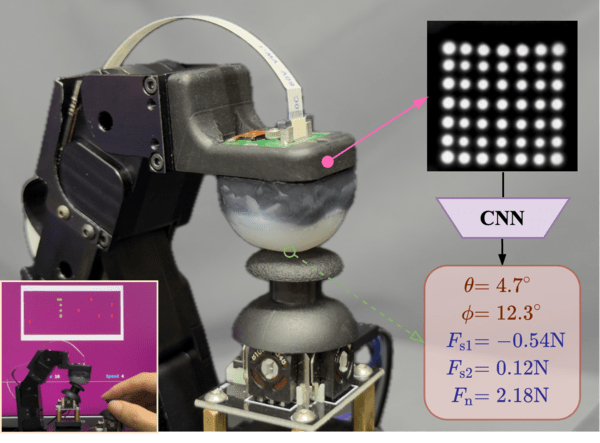
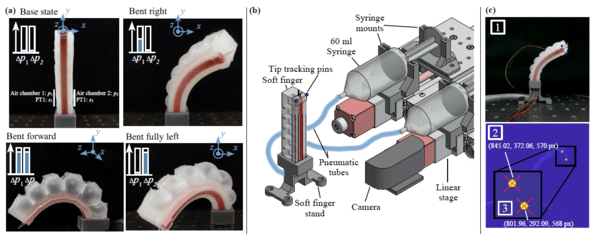
▲'DotTip: Enhancing Dexterous Robotic Manipulation with a Tactile Fingertip Featuring Curved Perceptual Morphology. ('DotTip: 곡선형 지각 형태를 갖춘 촉각 손가락 끝으로 더욱 능숙한 라이브바카라 조작을 향상시킨다)'
중국 저장대 엑스메카닉스센터 하오란 장(Haoran Zheng)은 3D 곡면 촉각 센서를 장착한 라이브바카라 손가락(DotTip)을 개발한 논문을 발표하였다. CNN 기반 접촉 각/힘 추정 기법과 실제 조이스틱 조작 등 다양한 실험을 통해 기존 평면 센서 대비 우수한 미세 조작 성능을 보였다. 인간형 손가락 촉각 구현의 좋은 시도이다.
▲'Multimodal and Force-Matched Imitation Learning with a See-Through Visuotactile Sensor. (투명 시각촉각 센서를 이용한 다중 모드 및 힘 매칭 모방 학습)'
캐나다 토론토대 스타즈랩 및 로보틱스연구소, 캐나다 몬트리올 삼성 AI 센터의 트레보 애블릿(Trevor Ablett)는 촉각 센서를 이용한 멀티모달·힘 정합 모방학습 논문을 발표하였다. 시각·촉각 센싱 모드 전환 및 힘 정합 알고리즘을 결합, 복잡한 문 손잡이 조작 등 실제 실험에서의 성공률을 대폭 향상시킨 결과를 보인다.
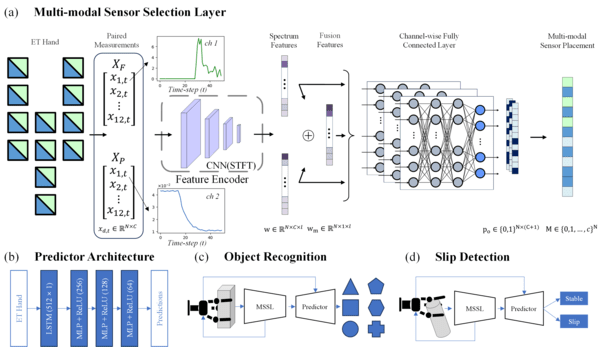
▲'Task-Specific Embodied Tactile Sensing for Dexterous Hand. (능숙한 손을 위한 특정 작업체화촉각 감지)'
중국장시성 지능형라이브바카라핵심연구실/중국 난창대 정보공학부의 치 웨이(Qi Wei)는 다기능 라이브바카라 손을 위한 작업 특화 촉각 센싱 구조를 제안한 논문을 발표하였다. 핫스왑 가능한 촉각 모듈과 최적 센서 배치 프레임워크를 개발하여, 다양한 조작에서 최소 센서로도 높은 인식 성능을 보였다. 라이브바카라 손의 효율적 센서 배치 전략을 제시한다.
▲'Dynamic Contact Force Estimation Via Integration of Soft Sensor Based on Fiber Bragg Grating and Series Elastic Actuator. (파이버 브래그 격자와 직렬 탄성 액추에이터 기반 소프트 센서의 통합을 통한 동적 접촉력 추정)'
한국 DGIST 라이브바카라메카트로닉스공학과 나현빈은파이버 브래그 격자(Fiber Bragg Grating) 기반 소프트 센서와 직렬 탄성 액추에이터(Series Elastic Actuator)를 통합한 시스템의 동적 접촉력 추정에 대한 논문을 발표하였다. 복합 센싱 구조를 설계해 힘 추정의 정확도와 실시간성을 높였으며, 라이브바카라의 미세 접촉 제어에 효과적으로 적용하였다. 실시간 접촉력 추정의 신뢰성을 크게 개선한 연구이다.
▲'Enhanced Model-Free Dynamic State Estimation for a Soft Robot Finger Using an Embedded Optical Waveguide Sensor. (임베디드 광도파관 센서를 사용한 소프트 라이브바카라 손가락의 향상된 모델 없는 동적 상태 추정)'
일본 요코하마 게이오대 과학기술대학원의 헨릭 크라우스(Henrik Krauss)는 임베디드 광 도파관 센서(Embedded Optical Waveguide Sensor) 기반 소프트 로봇 손가락의 동적 상태 추정에 관한 논문을 발표하였다. NARX 신경망 기반 센서 통합 구조로, 광학기반 소프트 센서의 추정 정확도와 다자유도 추적 성능을 실험적으로 입증하였다. 소프트 로봇 내장센서 활용의 실제 적용성을 높일 수 있는 연구이다.
3.4. 인간-라이브바카라 물리적 상호작용(pHRI)
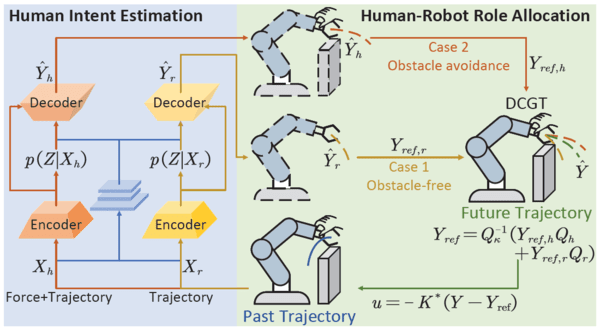
▲'DTRT: Enhancing Human Intent Estimation and Role Allocation for Physical Human-Robot Collaboration. ('DTRT: 물리적 인간-라이브바카라 협업을 위한 인간 의도 추정 및 역할 할당 향상)'
중국과학원의 하오치안 리우(Haotian Liu)는 물리적 인간-라이브바카라 협동에서 인간 의도 추정 및 역할 할당 향상에 대한 논문을 발표하였다. 딥러닝 기반 의도 인식과 실시간 역할 할당 알고리즘을 제안하였으며, 실험을 통해 작업 효율성과 적응성이 크게 향상됨을 보였다. 딥러닝에 기반한 인간-라이브바카라 물리적 협동의 가능성을 제시하는 연구이다.
▲'To Ask or Not To Ask: Human-in-the-loop Contextual Bandits with Applications in Robot-Assisted Feeding. ('물어볼 것인가 말 것인가: 라이브바카라 보조 급식에 응용할 수 있는 인간 참여 상황적 밴딧)'
미국 코넬대 컴퓨터사이언스학과 로한 배너지(Rohan Banerjee)는 Human-in-the-loop Contextual Bandits 알고리즘을 로봇 보조 급식에 적용한 논문을 발표하였다. 인간의 실시간 피드백을 적극 활용하는 정책 탐색 구조를 도입해, 적응적 의사결정 성능을 극대화하였다. 실제 시나리오에서 사용자 맞춤 로봇 서비스의 효과를 실증했다.
▲'Hand It to Me Formally! Data-Driven Control for Human-Robot Handovers with Signal Temporal Logic. ('공식적으로 내게 건네줘! 신호 시간 논리를 활용한 인간-라이브바카라 핸드오버를 위한 데이터 기반 제어)'
스웨덴 왕립공과대(KTH) 로보틱스및인지학습과의 파락 칸나(Parag Khanna)는 신호시간논리(Signal Temporal Logic)를활용한 인간-로봇 물체 전달의 데이터 기반 제어 방법을 다룬 논문을 발표하였다. 시계열 논리 기반 보상 설계와 데이터 기반 정책 학습을 결합해 다양한 핸드오버 시나리오에서 안전성과 효율성을 입증하였다. 인간-로봇 협동의 정밀한 수식화를 제시한다.
▲'Teleoperating a 6 DoF Robotic Manipulator from Head Movements. ('머리 움직임으로 6 자유도 라이브바카라 조작기 원격 조작)'
프랑스 파리 소르본대 알렉시스 포이그넌트(Alexis Poignant)는 머리 움직임만으로 6자유도 라이브바카라 매니퓰레이터를 원격 조종하는 논문을 발표하였다. 착용형 센서와 해석 알고리즘을 적용해 손 없이 복잡한 조작을 가능하게 하였으며, 다양한 사용자에 대한 실험에서 직관성과 효율성을 입증하였다. 장애인 보조·원격 제어 응용의 가능성을 보여준다.
▲'Path-Constrained Haptic Motion Guidance Via Adaptive Phase-Based Admittance Control. (적응형 위상 기반 어드미턴스 제어를 통한 경로 제한 햅틱 모션 안내)'
미국 MIT/독일 뮌헨공대라이브바카라 및 시스템 인텔리전스, MIRMI 의장 에르판 샤흐리아리(Erfan Shahriari)는 경로 제약 하에 인간의 촉각 유도와 라이브바카라 제어를 통합하는 적응형 위상 기반 어드미턴스 제어(Adaptive Phase-Based Admittance Control)에 대한 논문을 발표하였다. 위상 변수와 에너지 탱크 기반 안정성 보장 구조를 도입해 다양한 경로 제약 작업에서 인간-라이브바카라 협동 효율이 높음을 입증하였다. 경로 제약 작업에서 직관적·안정적 인간-라이브바카라 상호작용을 실현했다.
▲'A Hybrid Haptic Device for Virtual Car Door Interactions: Design and Implementation. (가상 자동차 도어 상호작용을 위한 하이브리드 햅틱 장치: 설계 및 구현)'
KAIST 메카트로닉스공학과 마지형은가상의 자동차 도어 상호작용을 위한 하이브리드 햅틱 장치(hybrid haptic device)의 설계 및 구현에 관한 논문을 발표하였다. 기계적 햅틱과 시각 피드백을 통합한 하이브리드 장치를 개발하여, 사용자의 현실감과 몰입도를 높이는 방법을 제시하였다. 사용자 실험에서 실제 도어와 유사한 촉감 및 조작감을 재현하는 결과를 얻었다. 실감형 가상 환경 인터페이스 개발에 중요한 진전을 보였다.
▲'Enhancing the LLM-Based Robot Manipulation through Human-Robot Collaboration. (인간-라이브바카라 협업을 통한 LLM 기반 라이브바카라 조작 향상)'
일본 나고야대학/도쿄대DRAGON연구실하오쿤 리우(Haokun Liu)는 인간-라이브바카라 협동을 통한 LLM 기반 라이브바카라 매니퓰레이션 향상에 대한 논문을 발표하였다. 대규모 언어모델의 지식과 인간의 피드백을 결합한 협동 학습 구조를 도입하였으며, 실제 매니퓰레이션 작업에서 학습 효율과 일반화 성능이 개선됨을 입증하였다.
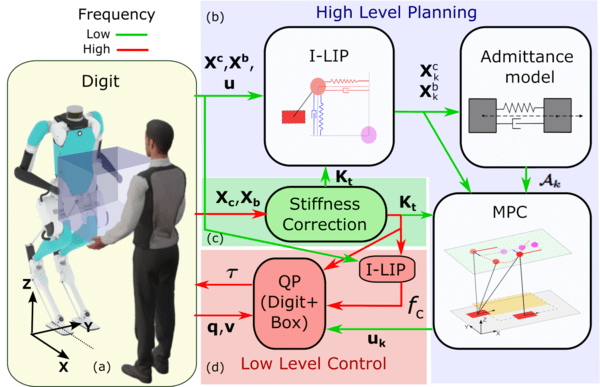
▲'MPC-QP-based Control Framework for Compliant Behavior of Humanoid Robots in Physical Collaboration with Humans. (인간과 물리적으로 협업하는 인간형 라이브바카라의 규정 준수 행동을 위한 MPC-QP 기반 제어 프레임워크)
미국 델라웨어대 기계공학과 슈밤 쿠마루(Shubham S. Kumbhar)는 인간과의 물리적 협동에서 휴머노이드 라이브바카라의 유연한 동작을 위한 MPC-QP 기반 제어 프레임워크를 발표하였다. 모델 예측 제어와로우레벨 2차 프로그램에 기반한 최적화를 결합해 충돌·순응 행동을 실시간 제어하였고, 실험을 통해 안전성과 적응성이 향상되었음을 보였다.
4. 기술 전시 및 산업 특징
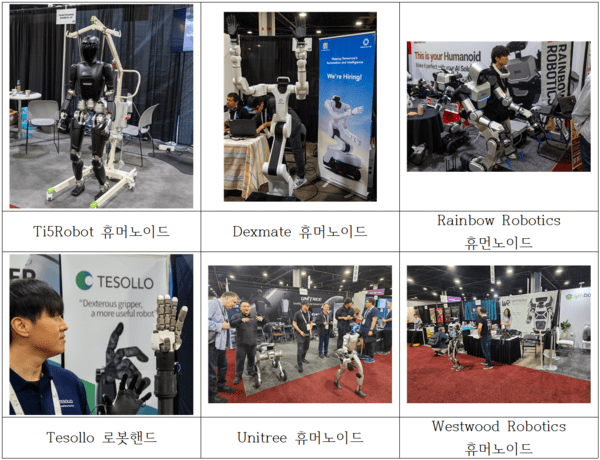
ICRA 2025의 산업 전시는 조지아 월드 콩그레스 센터 내 대규모 전시장에 마련되었으며, 150개 이상의 기업, 연구소, 기관이 참가하여 최신 로봇 플랫폼, 센서, 부품, 소프트웨어 솔루션 등을 전시하였다. 특히 제조, 물류, 의료, 건설 등 산업 분야별 적용 사례를 강조한 부스가 많아, 로봇 기술의 실용화 수준을 가늠할 기회였다. 가장 인상적이었던 것은 휴머노이드 및 촉각 센서 상용화 사례가 많다는 점이었다. 앞으로의 로봇 활용 분야 확대에 중요한 시사점을 남기는 전시였다.
5. 총평
ICRA 2025는 단순한 로봇 기술의 발표 자리가 아닌, 지속가능성과 연결성이라는 키워드를 중심으로 학문·산업·사회가 교차하는 통합의 장이었다. 특히 다음과 같은 세 가지 측면에서 중요한 통찰을 제공하였다.
- 생성형 AI와 라이브바카라의 통합이 실현 가능한 단계로 진입
대규모 언어 모델과 비전-언어 모델이 단순 조작을 넘어 다중 모달 reasoning, tactile manipulation, 행동 계획에 실질적으로 기여하고 있었다. 이는 라이브바카라이 단지 학습된 행위를 반복하는 것이 아니라, 고차원적 추론과 인간과의 협력을 바탕으로 자율적 판단을 수행하는 시대로의 이행을 시사한다.
- 물리적 지능(Mechanical Intelligence)과 AI의 결합 가속화
로봇의 형태나 구동계 설계 자체가 학습 구조와 함께 발전하고 있으며, 단순한 데이터 기반 튜닝을 넘어 구조적 최적화와 동적 강화학습이 메커니즘 설계에 직결되는 사례들이 다수 관찰되었다. 하드웨어와 소프트웨어가 상호 설계되는 구조적 융합은 앞으로의 핵심 화두로 자리 잡을 것이다.
- 신뢰 가능한 협동 인터페이스를 위한 인간-라이브바카라 상호작용 정교화
HRC 및 pHRI 기술이 점차 직관성(intuitiveness)과 적응성(adaptability)의 양립을 실현하고 있었으며, 신호 논리 기반 정책 설계, 햅틱 디바이스, 사용자 맞춤형 피드백 루프 등 구체적 구현 예시들이 인상적이었다. 인간의 의도를 기계가 파악하고 선제적으로 협력하는 기술은, 단지 보조를 넘어 동료로서의 로봇을 가능하게 한다.
이러한 흐름은 단순히 기술의 발전을 의미하는 것이 아니라, 기존의 산업 분야에 국한되었던 로봇의 활용 영역이 일상 영역 분야로 확대되는 본질적인 전환점으로 해석될 수 있다. AI에 기반하여 언어, 감각, 움직임을 이해하고 반응하는 로봇의 실현이 눈앞에 다가온 현시점에서 적용 분야의 공학적 문제들을 찾아내고 이를 해결하는 것이 앞으로의 숙제라는 것을 재확인할 수 있는 기회였다.