“기존 상용 기술 뛰어넘는 정밀 촉각…성공률 100% 달성”
중국 연구진이 손의 모든 부위에서 고해상도 촉각을 감지하고, 동시에 정교한 운동 기능을 수행할 수 있는 로봇핸드를 개발했다. 이 기술은 중국 로봇공학의 기술력과 자립 혁신 역량을 보여주는 사례로 평가받고 있다.
중국 관영 매체 런민르바오에 따르면, 베이징대학과 베이징범용인공지능연구원(北京通用人工智能研究院) 등으로 구성된 공동 연구팀은 ‘손 전체 촉각 기반 로봇핸드(F-TAC Hand)’ 시스템을 세계 최초로 개발했다. 해당 연구 성과는 6월 9일 국제 학술지 '네이처 머신 인텔리전스(Nature Machine Intelligence)'에 게재됐다.
연구팀에 따르면,사람의 손은 27개의 뼈와 34개의 근육으로 이루어져 있으며, 24자유도를 통해 매우 복잡하고 정밀한 동작을 수행할 수 있다. 이러한 손은 인류의 진화와 외부 세계와의 상호작용에 있어 핵심적인 역할을 해온 지능적인 운반체다.
이처럼 고도로 발달한 손의 기능을 모방하는 연구는 임바디드 인텔리전스와 무료 바카라사이트 공학 연구에서 매우 중요하게 다루어지고 있다. 사람의 손 기능을 성공적으로 모사한다면, 더욱 정교하고 지능적인 무료 바카라사이트 시스템 개발에 크게 기여할 수 있다.
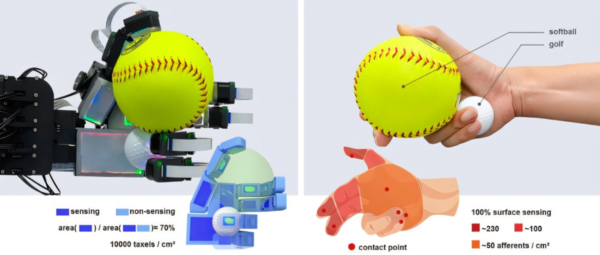
이번에 개발된 F-TAC 핸드는 손 전체에서 고해상도의 촉각 정보를 수집할 수 있는 능력과 더불어, 실제 인간 손과 유사한 수준의 운동 성능을 갖췄다. 손바닥 표면의 70%를 커버하는 촉각 센서는 공간 해상도 0.1mm로, 1㎠당 1만 개에 달하는 촉각 화소를 구현했다. 이는 기존 상용 로봇핸드의 감지 성능을 크게 뛰어넘는 수준이다.
F-TAC 핸드는 인간 손의 생물학적 구조를 모사해 17개의 고해상도 촉각 센서를 6가지 방식으로 통합 배치했다. 이 구조 덕분에 물체를 잡는 과정에서 실시간으로 촉각 변화를 감지하고, 빠르게 피드백을 반영해 그립을 조절할 수 있다. 이를 통해 비정형적 환경에서도 높은 안정성과 적응력을 확보했다.
또한 연구진은 인간이 사용하는 다양한 손 동작을 학습한 알고리즘을 탑재해, 총 19가지의 그립 유형을 구현할 수 있도록 했다. 실험 결과, 촉각 피드백 없이 동작했을 때보다 평균 성공률이 53.5%에서 100%로 향상됐으며, 물체 충돌이나 동작 오류에 대한 적응력에서도 큰 개선을 보였다.
연구팀은 이 기술이 향후 의료, 산업 제조, 특수 환경 작업 등 다양한 분야에 폭넓게 활용될 것으로 기대하고 있다.
논문의 공동 저자인 베이징대 인공지능연구원 주이신(朱毅鑫) 교수는 “앞으로 촉각 감지와 로봇 제어 기술을 심층적으로 융합해 보다 지능적이고 상호작용 가능한 로봇 모델을 탐색해 나가겠다”며 “이는 범용 인공지능(AGI)의 기반을 마련하는 중요한 발걸음이 될 것”이라고 밝혔다.